Unmanned Underwater Vehicle (UUV) Launcher
January - December 2022 // San Diego, CA
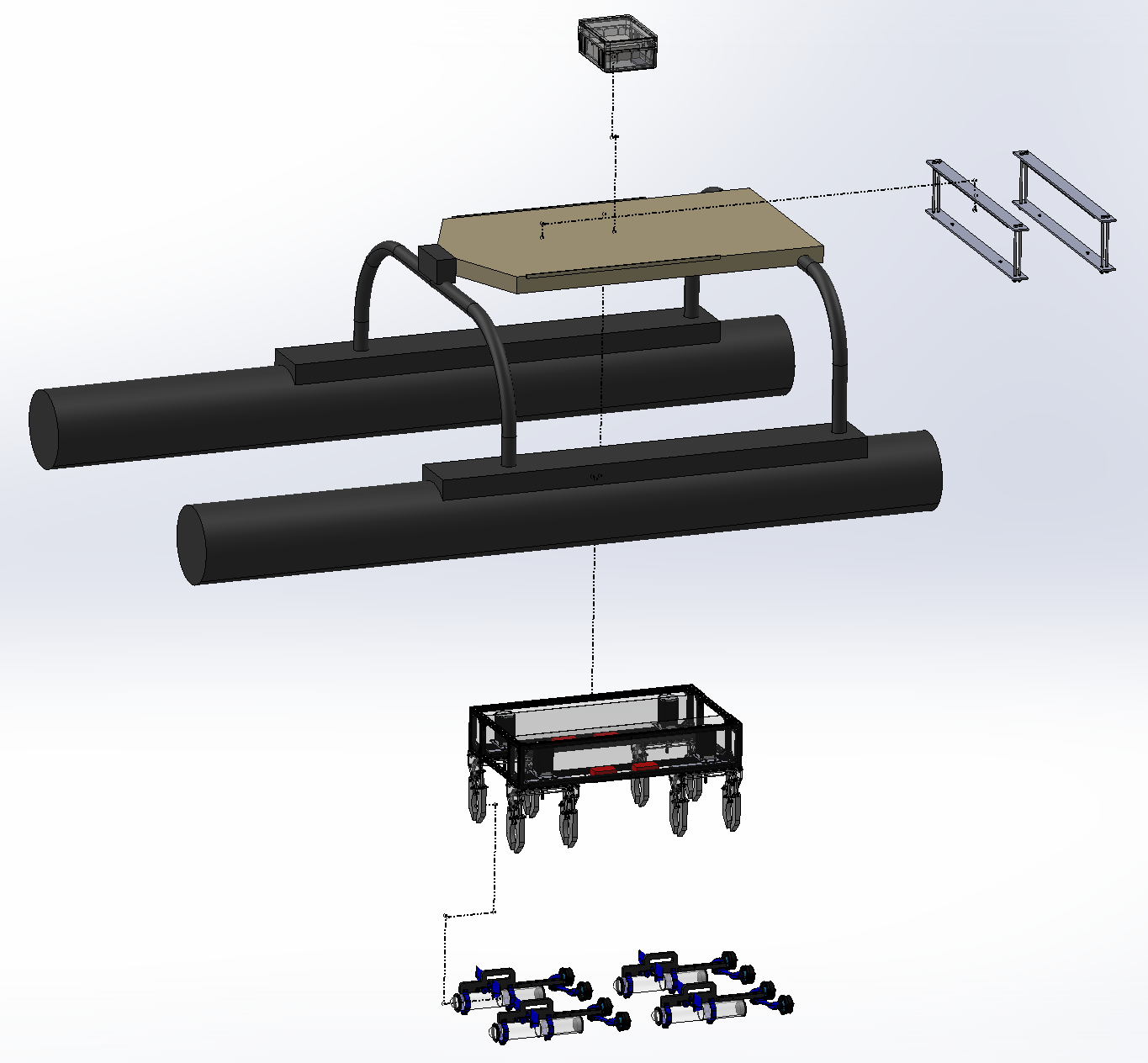
For my senior capstone project at San Diego State University, I partnered with the Naval Information Warfare Center (NIWC) of Point Loma, CA. NIWC had been working on a prototype submersible unmanned vehicle to gather intelligence & data from below the surface. I was tasked to design a launching mechanism under 50lbs that could successfully launch 4 of their UUVs from a minimum distance of 30 meters. The mechanism also had to be attached to the bottom of the unmanned watercraft shown above, WAM V-16.
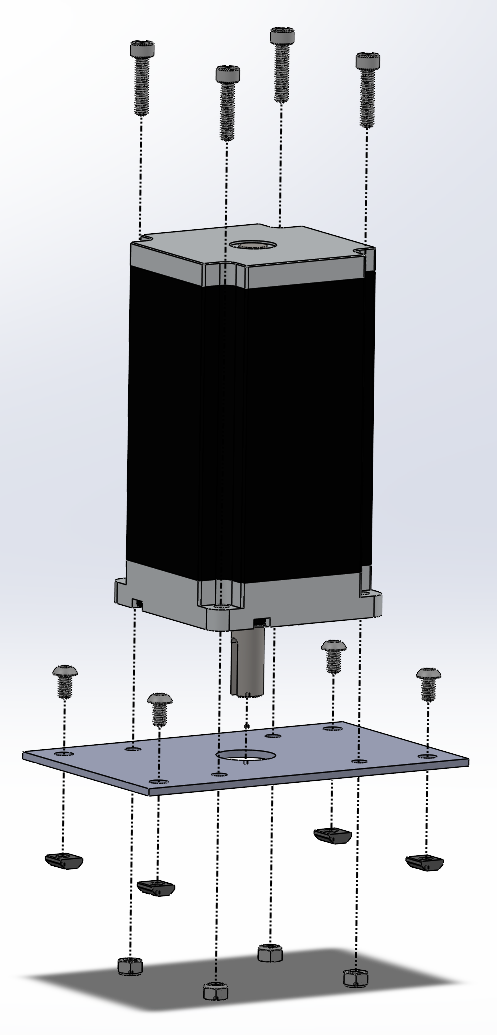
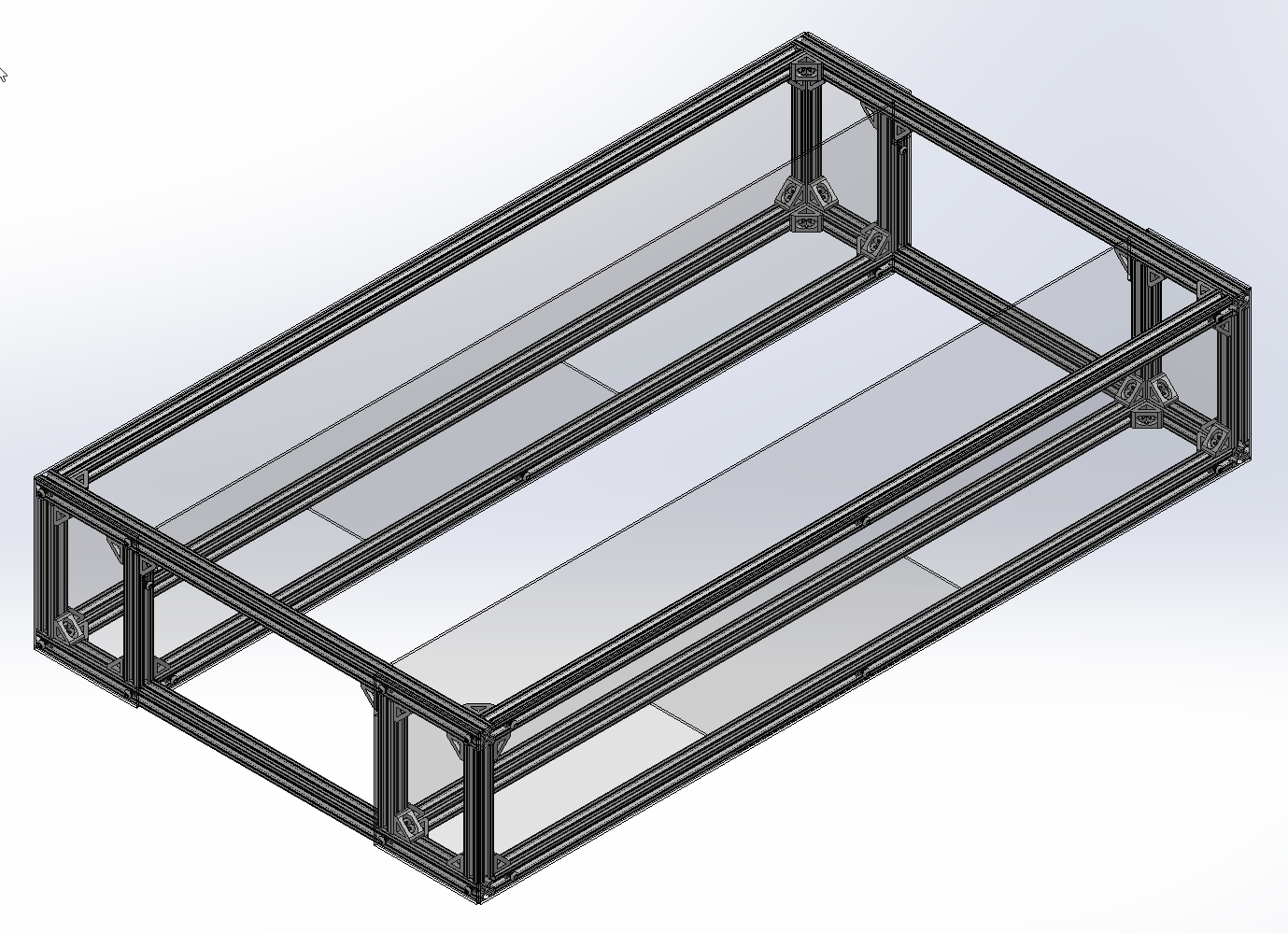
After multiple design ideas, I concluded on a claw mechanism to hold the 10lb UUVs. The claws would be controlled by stepper motors due to their high static holding strength and the motors would be controlled by 2 Arduino devices. Once the design was approved in spring 2022, I procure all the materials and began fabrication of all parts. I utilized the machine shop at SDSU to fabricate all our parts using; CNC mill, lathes, water jet, bandsaw, & 3D printers. I successfully assembled our launcher and wired the motors, drivers, transmitters, and Arduinos.
The Arduinos communicated via radio frequency. The Arduino connected to your computer would packet the imputed command; open, close, begin sequence, etc. The Arduino on the WAM V-16 would receive and open the info packet to perform the task. I successful tested up to 50 meters at full power transmission. The project was eventually turned over to the Naval Information Warfare Center for testing their prototype UUVs.